深谷 直樹 / Naoki FUKAYA
深谷 直樹(東京都立産業技術高等専門学校)
http://www2.metro-cit.ac.jp/~fukaya/
https://twitter.com/chidori_tt
ロボットハンドを作って学ぶ、人の動きのしくみ
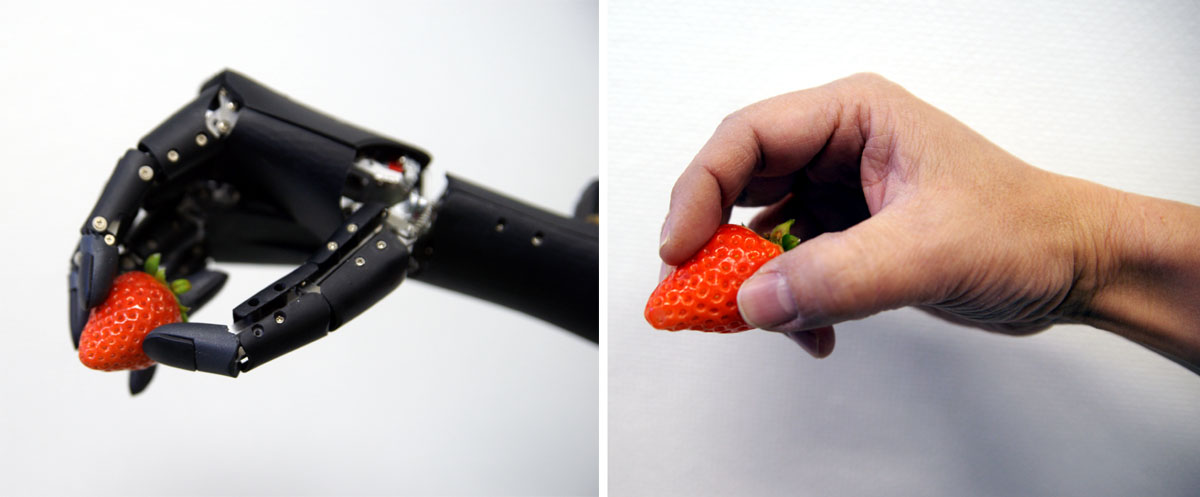
私たちが何か物を持つ時「では、人差し指は35度、中指は40度・・」などと指の関節角度全てを考えることはありません。「持つ」と考えるだけで、色々なものを簡単に持つことができます。ロボットには大変困難な作業なのに、何故人には簡単なのでしょうか。興味を抱いた私は人の仕組みを参考としたリンク機構、即ち独自の“からくり”を思いつき、2000年に1個のモータで簡単に物を持てる人型ロボットハンドを開発しました。
私たちが何か物を持つ時「では、人差し指は35度、中指は40度・・」などと指の関節角度全てを考えることはありません。「持つ」と考えるだけで、色々なものを簡単に持つことができます。ロボットには大変困難な作業なのに、何故人には簡単なのでしょうか。興味を抱いた私は人の仕組みを参考としたリンク機構、即ち独自の“からくり”を思いつき、2000年に1個のモータで簡単に物を持てる人型ロボットハンドを開発しました。
その後はこのからくりを元に、F-handという人型ハンドや1枚の紙から作るオリガミハンド、NHKの朝ドラ内に登場したピアノ演奏ハンドなどに加え、人に近い歩き方をする2足歩行ロボット、足首パワーアシスト装置なども開発してきました。
講演ではこれらの技術を通して、人の動きを再現する難しさ、そしてロボットを作ることで人の動きのしくみが見えてくる面白さをお伝えしたいと思います。
SONY DSC
2022/03/24