多田隈 理一郎 / Riichiro Tadakuma
山形大学
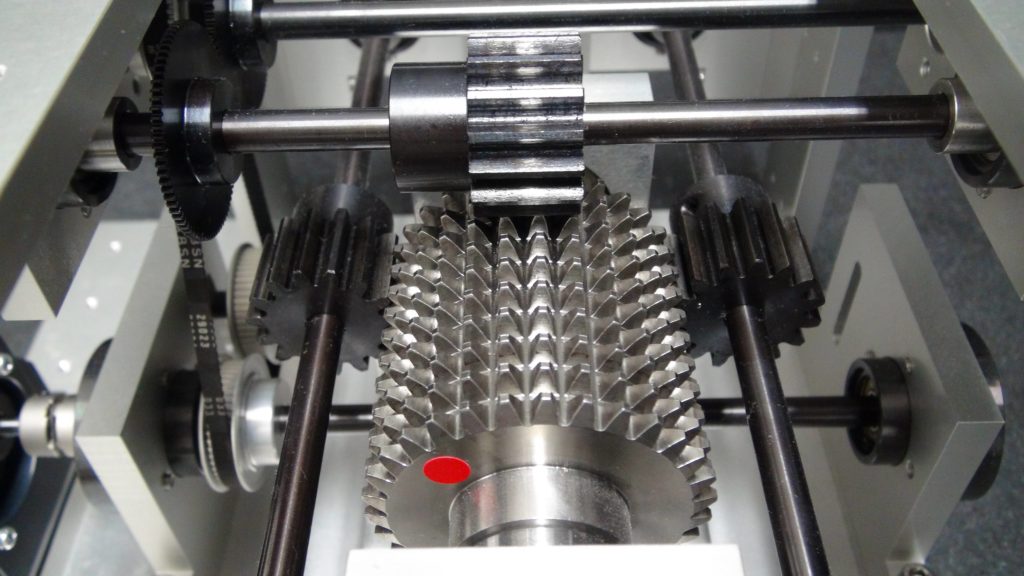
「全方向駆動歯車機構の原理創案・具現化」
当該研究者は、これまで、様々な曲率を有する全方向駆動歯車を開発し、それを用いたロボットシステムにより、物体の搬送や、視覚障碍者の誘導などの課題に取り組んできた。本講演においては、それらの全方向駆動歯車の機構について説明すると共に、そのような機構を用いたシステムの設計・開発過程について紹介する。
2022/03/24
ロボットのある未来の暮らしを創造するために。 新進気鋭の研究者、開発者たちが語る、ロボットのおもしろさ。