多田隈 建二郎 / Kenjiro Tadakuma
東北大学大学院 情報科学研究科 応用情報科学専攻 准教授
https://www.youtube.com/watch?v=JPr3ta8KDRc
https://www.youtube.com/watch?v=BTp2UAaihaI
http://www.rm.is.tohoku.ac.jp/
「全方向駆動メカニズムをはじめとする,ロボット機構の創出過程
- 極めて泥臭い,,,が,心が躍るアイディア出しと具現化の実際 -」
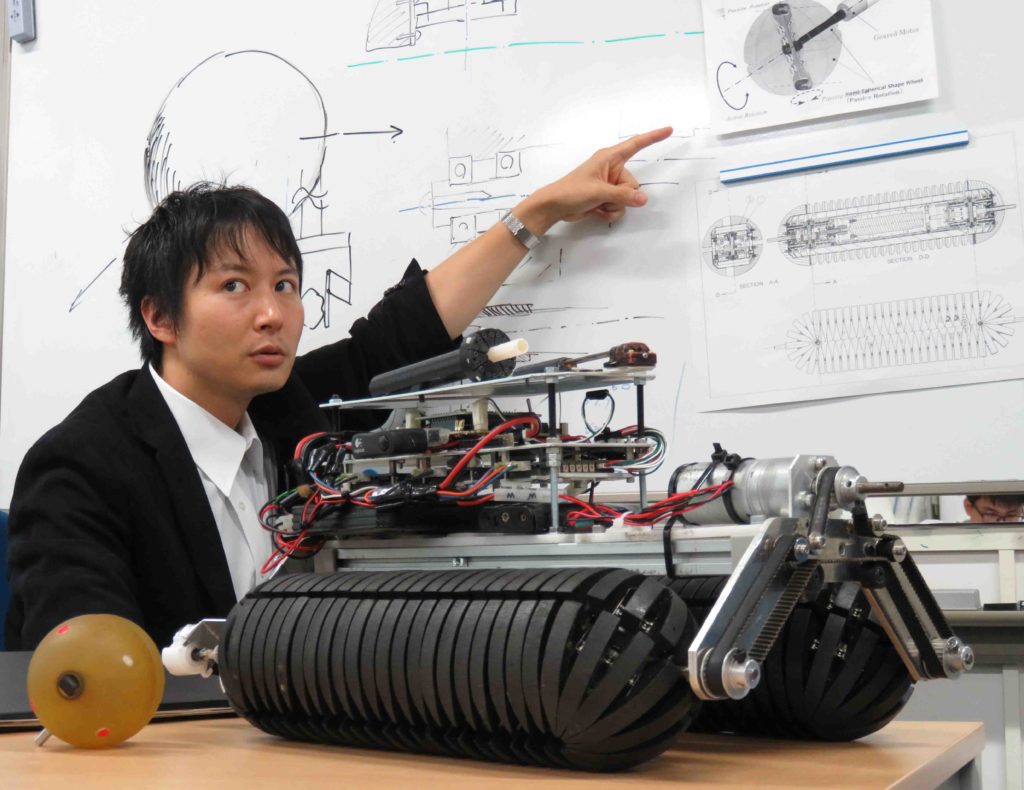
本講演においては,我々が考案・研究開発してきた球状全方向車輪“Omni-Ball”を研究開発の核・原点とした各種全方向駆動メカニズムを体系的に紹介することを試みます.この車輪機構を皮切りとした,横方向移動が可能な円形断面クローラ“Omni-Crawler”,対象物への接触がより安定している全方向面状駆動機構“Omni-Gear”,高いなじみ性と高保持力の両立を実現する全方向包み込み式グリッパ機構“Omni-Gripper”,など,これらは一見すると別物に見えますが,実はそれらの根本構造に関しては,原理的共通項が存在します.事例として紹介するこれら複数の構造の原理的共通項を抽出・明確化することで,新しいロボット機構の コンセプトのアイディア創出方法,そのアイディアを形にするためのラフスケッチ・試作といった一連の具現化の流れ(ココで心が躍る!)に関してもご紹介できればと考えています.